This project is about Tracking a Ball shaped object using Kalman Filter.
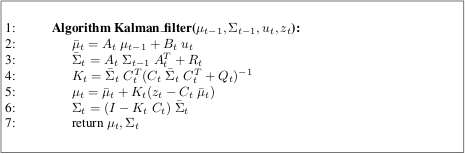
A Kalman Filter works by maintaining an estimate of state and predicting how it will change, then comparing that estimate with observed values.
Both the expected and the observed values have an amount of uncertainty associated with them. The algorithm adjusts its belief for the next cycle
by resolving the difference between the expected and observed values according to these uncertainties.Kalman Filter is usually used for state
estimation and Sensor Fusion in Robotics Applications.

For edge detection I used Canny Edge detection

