Intel Realsense SR300 with Jetson Nano produces incorrect depth values in Ubuntu #5845
Description
-
Before opening a new issue, we wanted to provide you with some useful suggestions (Click "Preview" above for a better view):
- Consider checking out SDK examples.
- Have you looked in our documentations?
- Is you question a frequently asked one?
- Try searching our GitHub Issues (open and closed) for a similar issue.
-
All users are welcomed to report bugs, ask questions, suggest or request enhancements and generally feel free to open new issue, even if they haven't followed any of the suggestions above :)
| Required Info | |
|---|---|
| Camera Model | SR300 |
| Firmware Version | 3.21.0.0 |
| Operating System & Version | Linux (Ubuntu 18.04) |
| Kernel Version (Linux Only) | 4.9.14 |
| Platform | NVIDIA Jetson Nano |
| SDK Version | 2.0 |
| Language | C++ |
| Segment | Computer Vision |
Issue Description
Hi, I am new to the realsense SDK. I am trying to work on the depth values obtained from the realsense in c++ on Jetson nano. I noticed that the depth values obtained in the realsense-viewer does not reflect the real distance to the object. The max value I get is 0.13m. But when I connect the same camera to my desktop which is running Windows 10, I can see that the depth values obtained are very close the actual distance to the object. In both cases the camera and the object are placed in the same position. The parameteres on the realsense-viewer have been kept the same. Can you please tell me if there is something wrong i am doing. For reference see below the snapshots from realsense-viewer. Thank you in advance for your help and answers.
Windows:
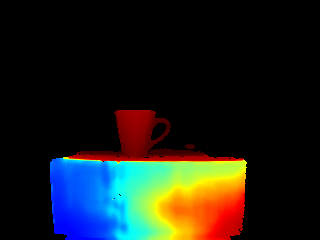
Ubuntu(Jetson nano):