how to make the gripper grasp the object toughly #3732
Yangziqi1920
started this conversation in
General
Replies: 2 comments
-
|
Could you provide a simple test that i can reproduce your issue? thanks. |
Beta Was this translation helpful? Give feedback.
0 replies
-
|
Have you solved it? |
Beta Was this translation helpful? Give feedback.
0 replies
Sign up for free
to join this conversation on GitHub.
Already have an account?
Sign in to comment
Uh oh!
There was an error while loading. Please reload this page.
-
Hello everyone
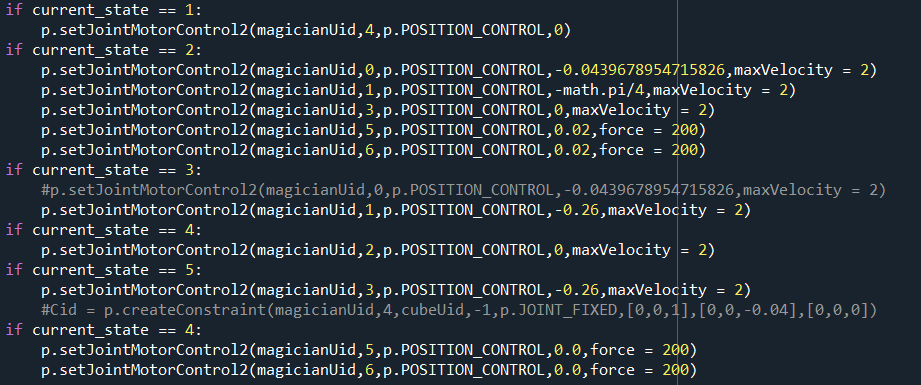
Now I am doing pybullet with dobot robot, I made my own urdf file through solidworks, but when I want to make my gripper grasp the object tough, but it doesn't work rightly, my griper cannot grasp the object.
I saw many examples such as panda kuka robots, their gripper can rightly grasp the object. I want to know why?
Thanks for your answers!
pybullet.setJointMotorControl2(RobotUID,
FINGER_JOINT_NUM,
pybullet.POSITION_CONTROL,
targetPosition=0,
force=self.fingerTipForce)
this is my method.
Beta Was this translation helpful? Give feedback.
All reactions